The use of satellites is a highly developed technology utilized extensively throughout the world. In the past 2 decades, it has progressed from quasi-experimental in nature to one with routine provisions of new services. They take advantage of the unique characteristics of geostationary satellite orbits (GSO). The design of satellite systems is well understood, but the technology is still dynamic. The satellites are useful for long-distance communication services, for services across oceans or difficult terrain, and point to-multipoint services such as television distribution.
Frequency allocation for satellites is controlled by the International Telecommunication Union (ITU). In the U.S., the Federal Communications Commission (FCC) makes the frequency allocations and assignments for nongovernment satellite usage. The FCC imposes a number of conditions regarding construction and maintenance of in-orbit satellites.
There are many satellite systems operated by different organizations and different countries mainly developed for communications and data transmissions; these include: Iridium of Motorola, Global star of Loral Corporation, Intelsat, CS-series of Japan, Turksat of Turkey, Aussat of Australia, Galaxy and Satcom of the U.S., Anik of Canada, TDF of France, etc. Some of the communication satellite systems are suitable for navigation purposes. However, satellite systems specifically designed for navigation are limited in number. The most established and readily accessible by civilian and commercial users are the GPS system of the U.S. and the Glonass of Russia.
The first generation of the satellite system was the Navy satellite system (Navsat), which became operational in January 1964, following the successful launch of the first transit satellite into polar orbit.
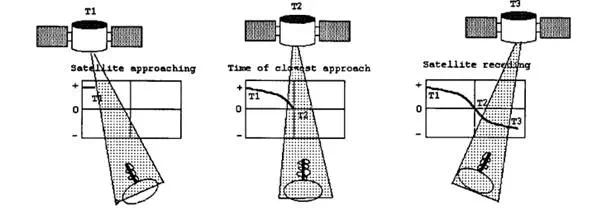
FIGURE 10.34 Transit satellite Doppler curve. As the satellite approaches the receiver, the frequency of the received signal increases due to Doppler shift. At the time of closest approach, the transmitted and received frequencies are the same. The frequencies received from a receding satellite result in lower values. This is also applicable in other position sensing satellites such as GPS, Glonass, Starfix, etc.
The system was declared open for private and commercial use in 1967. Civil designation of the name of the system is Transit Navigation Satellite System, or simply Transit. Later, this system evolved to become the modern Navsat GPS system, which will be discussed in detail. Most of the operational principles discussed here are inherited by the GPS system.
The Transit system consists of operational satellites, plus several orbiting spares, a network of ground tracking stations, a computing center, an injection station, naval observatory time signals, and receiver computer combinations. The transit satellites are in circular polar orbits about 1075 km above ground with periods of revolution of about 107 min. Because of the rotation of the Earth beneath the satellites, every position on Earth comes within range of each satellite at least twice a day, at 12 h intervals. As originally intended, if at least five satellites are operational at any given time, the average time between fix opportunities would vary from about 95 min near the equator to about 35 min or less above 70° North and South.
The Transit system is based on the Doppler shift of two frequencies, 150 MHz and 400 MHz, transmitted simultaneously by each satellite moving its orbit at a tangential velocity of about 7.5 km s–1. Two frequencies are used so that the effects of the ionosphere and atmospheric refraction on the incoming satellite transmission can be compensated for by the receivers. Each frequency is modulated by a repeating data signal lasting 2 min, conveying the current satellite time and its orbital parameters and other information. Within the receiver, a single Doppler signal is created by processing the two signals transmitted by the satellite. By plotting the frequency of this signal versus time, a characteristic curve of the type shown in Figure 10.34 is obtained. Since the frequency of the transmitted signal is compressed as the satellite approaches, according to what proportion of the velocity vector is seen by the user receiver, the curve begins at time T1 at a frequency several cycles higher than the transmitted frequency.
Tracking stations record Doppler observations and memory readout received during each satellite pass to relay them to a computer center. Updated orbital position and time data communications are relayed to an “injection” station from the computer center for transmission to satellite in a burst once each 12 h. Enough data is supplied in this 15 s injection message to last for 16 h of consecutive 2 min broadcasts describing the current orbital positions of the satellite.
The system accuracy depends on the accuracy of the satellite orbit computation, the effect of ionosphere refraction, the precision of the receiver speed, and heading determination. Under optimal conditions, the system is capable of producing fixes with a maximum rms error of about 35 m for the stationary receivers anywhere on Earth. Nevertheless, if a site is occupied for several weeks, an accuracy better than 1 m can be achieved. The time signal transmitted as a “beep” at the end of each 2 min transmission cycle coincides with even minutes of Coordinated Universal Time, which can be used as a chronometer check.
There are other satellite systems, either already in existence or in the planning stages, suitable for navigation. Some of these are: Marec satellites operating at VHF and owned by the intergovernmental consortium INMARSAT; privately owned Geostar provides services for oil industry; and many other systems offering transcontinental communication and navigation services as well as position sensing; examples include: SATCOM, ARINC’s, Avsat, Starfix, etc.



Comments are closed.