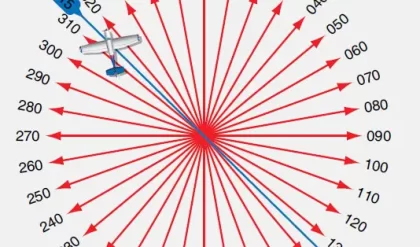
The primary navigation aid for civil aircraft flying in the airspace of most of the developed countries is the VOR/DME system. The VOR (Very high frequency Omni Range) and the DME (Distance Measuring Equipment) enable on-board determination of an aircraft’s bearing relative to North at the fixed ground station and slant range from the station, respectively. Further details can be found in references given at the end of this chapter.
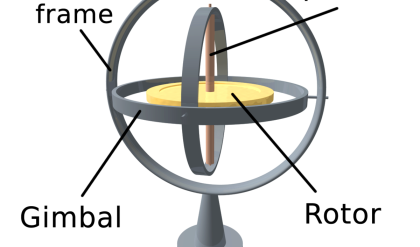
Many commercial aircraft are equipped with precision Inertial Navigation Systems (INS) not only for navigation purposes, but also for stabilization of the aircraft at all times. Suitably located gyroscopes and accelerometers give signals to control the stability of the aircraft, as shown in Figure 10.25. Many aircraft INS utilize a gyro-stabilized platform on which the accelerometers are mounted. The platform is aligned before take-off to the desired orientation. Due to alignment errors and in-flight random disturbances such as gyro drift, scale factor errors, and accelerometer bias errors, the errors in the desired orientation increase with time. The errors need to be compensated periodically by external information such as Omega navigation systems. Omega is a 10 kHz to 14 kHz navigation system that was primarily intended for updating submarine inertial navigators because of its very low frequencies penetrating beneath the ocean surface. It is also used by many general-aviation and military aircraft because of its worldwide coverage.
Some airlines (e.g., American Airlines) have equipped their entire fleet with Omega receivers. The U.S. Coast Guard maintains two Omega stations and other countries maintain six more. Each station transmits eight consecutive sinusoidal tones with a 10 s repetition rate. Four are navigation tones common to all stations; the other four tones uniquely identify the station. Each station has a cesium clock that is calibrated within 1 µs by exchanging portable atomic clocks with other Omega stations and with the U.S. Naval Observatory.
GPS systems give all vehicles on or near the Earth unprecedented navigation accuracy. A number of international airlines are equipped with confined GPS-Glonoss receivers. Many experiments are now in progress to balance the cost versus accuracy of various combinations of inertial, Omega, Loran, GPS, and Transit equipment. Airborne receivers are designed that combine navaids operating in a common radio band (e.g., GPS, DME, JTID, and IFF).
INMARSAT’s “Marec” communication satellites serve ship traffic but are configured to serve air traffic by directly communicating with aircraft for approximately $10 per call.
Underwater
The Ship’s Inertial Navigational System (SINS) was originally developed for precision position-finding required by ballistic missile submarines in the late 1950s and early 1960s. The first deployment was onboard U.S. George Washington in 1960, and SINS are used today in submarines, aircraft carriers, and other surface warships. As the cost and size are continually decreasing, the system is also deployed in naval as well as merchant vessels. Another development of INS for underwater application is in the area of the autonomous underwater vehicle (AUV). In this section, a number of such products are described.
AUVs are used extensively for military and civilian purposes. Application examples are mapping, surveillance, ocean exploration, survey, and mining, all of which require precise position determination. The desired features of such systems are: low power, high accuracy, small volume, light weight, and low cost. Two typical examples are the LN family produced by Litton Guidance and Control Systems, and the system developed by the Harbour Branch Oceanographic Institution Inc. (HBOI). The specifications of some of these systems are briefly described below to give examples of underwater INS.
The Litton LN-100 System
Litton’s LN-100 is an example of the strapdown INS. The LN-100 system consists of three Litton Zero Lock Gyros (ZLG), a Litton A4 accelerometer triad, power supply, supporting electronics, and a JIWAG standard 80960 computer. The single-board computer performs all the control, navigation, and interface functions.
The HBOI System
The HOBI system was developed with Kearfott Guidance and Navigation (KGN) and utilizes a Monolithic Ring Laser Gyroscope (MRLG), motion sensors, GPS input, and control unit. The inertial measurement unit is based on the Kearfott’s T16-B three-axis ring laser gyro and three accelerometers.
Robotics
Closely related to the autonomous underwater vehicles, autonomous mobile robots also use INS extensively as a self-contained, independent navigation system. Typical applications are mining, unknown terrain exploration, and off-line path planning. There are many commercially available inertial navigation systems suitable for cost-effective utilization in the navigation of robots. Some of these are: gyrocompasses, rate gyros, gyrochip, piezoelectric vibrating gyros, ring laser gyros, interferometric, and other types of fiber-optic gyros. Three popular systems will be explained here.
The Honeywell Modular Azimuth Position System (MAPS)
Honeywell’s H-726 Modular Azimuth Position System (MAPS) is a typical example of an inertial navigation system for land-based vehicles. It consists of a Dynamic Reference Unit (DRU) that provides processed information from the inertial sensor assembly, a Control Display Unit (CDU) that is used for human-machine interface, and a Vehicle Motion Sensor (VMS) that monitors the vehicle’s directional and distance information. The inertial sensor assembly comprises three Honeywell GG1342 ring-laser gyros and three Sundstrand QA2000 accelerometers mounted to measure movements in three local axes. The inertial processor translates the information to the navigation processor that resolves the vehicle movement information from the VMS. The CDU provides mode selection, data display, waypoint information, and general operator interface.
Hitachi Fiber-Optic Gyroscopes
The Hitachi products are significant as they are relatively inexpensive and were designed for automotive applications. The open-loop Interferometric Fiber-Optic Gyros (IFOG) HOFG-4FT received the “Most Technologically Significant New Products of the Year” award in 1993, and is now installed in one of the production models from Toyota. The subsequent models of IFOG are HOFG-X, HOFG-1, and HGA-D. The HOFG-1 has been employed extensively in industrial mobile robots. The output of the system can be in serial form in RS-232 standard or as analog signals. Specifications of HOFG-1 include a range of ±60° s–1, an update rate of 15 ms, and linearity of ±0.5%. The power requirement is 10 to 16 V dc and 0.5 A.