In modern vehicular navigation, computerized maps and mobile communication equipment are integrated together with inertial and/or other electronic navigation systems. In recent years, in the wake of low-cost GPS systems, the vehicular navigation system has attracted much attention due to its large potential markets for consumer as well as business vehicles.
Automobile navigation systems are based on dead-reckoning, map matching, satellite positioning, and other navigational technologies. Map intelligent systems achieve high relative accuracy by matching dead reckoned paths with road geometry encoded in a computerized map. This is also used to perform other functions such as vehicle routing and geocoding. Satellite-based navigation systems achieve high absolute accuracy with the support of dead-reckoning augmentation.
The capabilities and functions of automobile navigation systems depend on:
· Choosing the necessary technology
· Integrating the overall system
· Resolving driver interface
· Providing map data basis
· Coordinating mobile communications
Digital maps and mobile data communications combine together for full usefulness and effectiveness. The navigation systems are greatly enhanced in conjunction with stored digital maps combined with effective communications.
The usefulness of a navigation system is related to the accuracy in position determination. There are a number of methods available with varying accuracy; these include the following:
Dead-reckoning
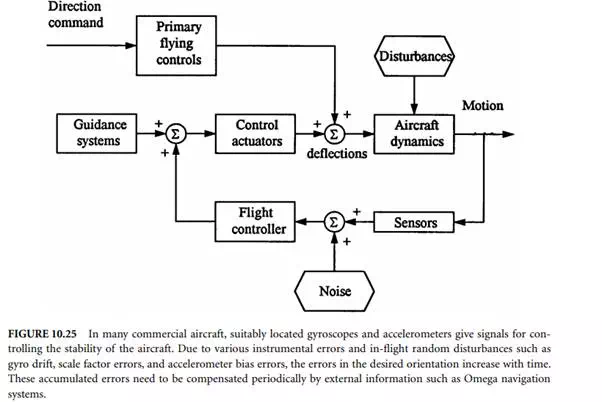
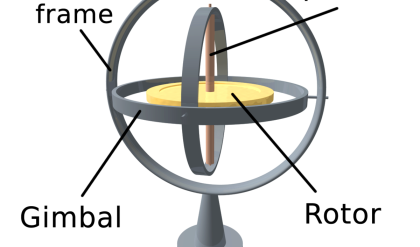
Dead-reckoning is the process of determining vehicle location relative to an initial position by integrating measured increments and directions of travel. The devices include the odometer, the differential odometer, and a magnetic compass. Gyros and inertial systems prove to have limited applications in harsh automotive environments. Although, dead-reckoning systems suffer from error accumulation, they are widely used inertial navigation systems, particularly in robotics and vehicular applications. Even the most precise navigation system requires periodic reinitialization and continuous calibrations by computers.
Radiolocation
In radiolocation, the global positioning system (GPS) is used extensively. Nevertheless, LORAN is gaining popularity as means of tracking land vehicle location from a central location. But its modest accuracy limits its global application in automotive navigation.
Map Matching
Artificial intelligence concepts are applied to match dead-reckoned vehicle paths, which are stored in computers. In map matching, sensed mathematical features of the vehicle paths are continuously associated with those encoded in a map database. Thus, a vehicle’s dead-reckoned location can be initialized automatically at every turn to prevent accumulation of dead-reckoning errors.
The first application of map matching technology was in the Automatic Route Control System (ARCS), which used a differential odometer for dead-reckoning. In another system, the Etak map matching system, a solid-state flux gate compass is used as well as a differential odometer to dead-reckon paths for matching with digitized maps and aerial photographs. Further details on these technologies can be found in the references given at the end of this chapter.
In a map matching system, as long as the streets and road connectivity’s are accurately defined, the process identifies position relative to the road network as visually perceived by the vehicle driver.
Most of the dead-reckoning equipment commercially available is sufficiently robust to support map matching when operating in a defined road network. However, a good dead-reckoning accuracy is required to achieve reinitialization through map matching upon returning to the road network after off-road operations.
Proximity Beacon
This approach uses strategically located short-range transmitters, and reception of their location coded signal infers the receiving vehicle’s instantaneous location. There are several variations of the proximity approach; some versions involve two-way communications with the equipped vehicle. Typically, the driver enters the destination code on the vehicle panel, for automatic transmission to the roadside unit, as the vehicle approaches an instrumented intersection. The roadside unit, which can be networked with a traffic management system, analyzes the destination code and transmits route instructions to the display on the vehicle panel. Proximity beacon systems are being tested in Germany and Japan. One of the most popular system is the ALI-SCOUT (see references) proximity beacon system, which uses dead-reckoning and map matching techniques between beacons to download updated map and traffic data in Berlin.
The approach to the interface between an on-board navigation system and a vehicle operator must take into account ergonomics and safety considerations as well as functional requirements. As a result of intensive research, especially in the aerospace industry, display of information for the operator is a well-developed area. In a well-known European system, Philips’ CARIN, a color CRT map display is used to show vehicle location relative to the surroundings. Many other systems use short visual messages, symbolic graphics, and voice.
Major potential roles for data communications in future automobile navigation need to provide current updates (road additions, closures, detours, etc.) for on-board map databases, and also provide real-time information on traffic conditions for on-board route generation.


Comments are closed.