As I said in the previous post Open loop control system don’t give the required level of control as they depend on human judgement.
Example of feedback principle:
Home furnace control system must control the temperature in the room and kept it constant. As in open loop system a timer is used to switch on the furnace for some time and then switch it off, accuracy is not obtained. This is because the system does not act according to the room temperature but according to a preset value of time.
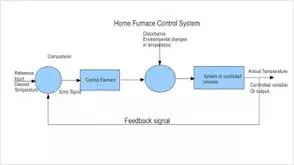
A closed loop control system takes care of this problem. The feedback unit (the main component of the closed loop control system) senses the room temperature and accordingly turns on or off the furnace. The feedback unit feeds the output back to a comparator which is provided with a reference value with which the output is compared to generate an error signal. This error signal generates the required control action. In the home furnace control system, a temperature sensor is used to sense the temperature in the room and this is feedback to an error detecting device. The error detecting device compares the room temperature with the reference value. If it detects that the room temperature is higher than the reference value, if generates a signal to switch off the furnace. On the other hand, if it detects that the room temperature is lower than the reference value, it generates a signal to switch on the furnace. This has been shown in the figure.
Hence it is clear that a system with feedback (closed loop control system) is efficient than that of a system without feedback (open loop control system).
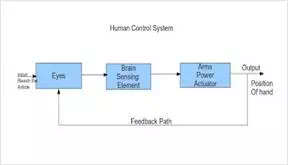
Another examples of a closed loop control system is the working of a human brain. If a person wants to pick up an article say bag or book, the brain instructs the hand to reach the article and the eyes constantly keep giving the feedback to the brain regarding the position of the hand relative to the article. But if the person is asked to reach the article closing his eyes, he can reach it only approximately. Thus the human system is a very accurate feedback control system. The control system taking human as an example is shown in the figure.
While designing a closed loop system, a compromise between stability and accuracy is to be established. This is because the gain of the system may exceed over a limit which may cause the system to be over correct, leading the system to become unstable, that is, oscillation of the output without bound.
Note
Gain is the ratio between the amplitude of the output to the amplitude of input. The variation of the gain over a range of the frequencies is called frequency response. Moreover, due to mechanical problems like friction, the system might tend to have a steady state error.